Forschungsbericht 2009
Modulation der Hubgeschwindigkeiten von Tragseilen zur Vermeidung angefachter Schwingungen
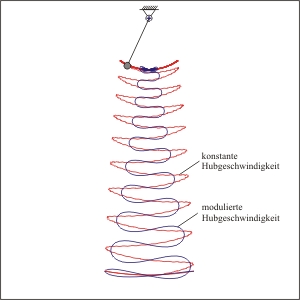
Bei Kranen werden Lastschwingungen durch Einziehen der Tragseile - als Folge der nichtlinearen Dynamik - angefacht. Besonders bei schwebenden und schwimmenden Kranen fehlen darüber hinaus geeignete, d.h. hinreichend schnelle, Aktoren, so dass im Gegensatz zu anderen Krantypen eine aktive Schwingungsdämpfung der Traglast zunächst nicht möglich ist. Alternativ sollen nun die schwachen Kopplungen zwischen der Hubbewegung und den Pendelschwingungen für eine Schwingungsreduktion mittels einer variierenden Hubgeschwindigkeit ausgenutzt werden, um die Sicherheit und Effizienz des Kranbetriebs zu erhöhen. Autoparamterische Resonanzen, bei denen Energie zwischen verschiedenen Schwingungsformen ausgetauscht wird, können bei vielen technischen Systemen auftreten und führen in der Regel auf ein unerwünschtes Verhalten. Demgegenüber sollen in diesem Vorhaben Grundlagen geschaffen werden, diese Phänomene für eine gezielte Verbesserung der dynamischen Eigenschaften technischer Systeme zu nutzen. Numerische Methoden sollen entwickelt werden, die die Kenntnisse aus der oft auf wenige Zustandsgrößen beschränkten Analyse auf technische Systeme mit mehreren wesentlichen Freiheitsgrade erweitern. Die Resonanzbedingung gibt ursprünglich eine Vorschrift zur Abstimmung des passiven Systems an, lässt aber auch die Interpretation als Reglergesetz für die Winden zu, um die Resonanz künstlich zu etablieren. Die Methode verspricht folgende Vorteile: - Strukturelle Eigenschaften des nichtlinearen Systems werden genutzt, um das System einer aktiven DisspationNumerische Methoden sollen entwickelt werden, die die Kenntnisse aus der oft auf wenige Zustandsgrößen beschränkten Analyse auf technische Systeme mit mehreren wesentlichen Freiheitsgrade erweitern. Die Resonanzbedingung gibt ursprünglich eine Vorschrift zur Abstimmung des passiven Systems an, lässt aber auch die Interpretation als Reglergesetz für die Winden zu, um die Resonanz künstlich zu etablieren. Die Methode verspricht folgende Vorteile: - Strukturelle Eigenschaften des nichtlinearen Systems werden genutzt, um das System einer aktiven Disspation zugänglich zu machen, selbst, wenn das linearisierte System nicht oder nicht effizient steuerbar ist. Bei Kranen, deren Aufhängepunkt nicht gezielt verschieblich ist, kann ein Eingriff über vorhandene Elemente (Winden) vorgenommen werden. - Bei Kranen kann das Aufschaukeln in Folge des Einziehens der Last von vornherein vermieden werden, anstatt die angefachte Schwingung zu dämpfen. - Die Effektivität dieses nichtlinearen Reglers nimmt mit der Schwingungsamplitude zu (ebenso wie die Neigung zum Aufschaukeln der ungeregelten Strecke). Eine Kombination mit anderen aktiven und passiven Dämpfern, die besonders bei kleinen Amplituden wirksam sind, bietet sich an. zugänglich zu machen, selbst, wenn das linearisierte System nicht oder nicht effizient steuerbar ist. Bei Kranen, deren Aufhängepunkt nicht gezielt verschieblich ist, kann ein Eingriff über vorhandene Elemente (Winden) vorgenommen werden. - Bei Kranen kann das Aufschaukeln in Folge des Einziehens der Last von vornherein vermieden werden, anstatt die angefachte Schwingung zu dämpfen. - Die Effektivität dieses nichtlinearen Reglers nimmt mit der Schwingungsamplitude zu (ebenso wie die Neigung zum Aufschaukeln der ungeregelten Strecke). Eine Kombination mit anderen aktiven und passiven Dämpfern, die besonders bei kleinen Amplituden wirksam sind, bietet sich an. Publikationen
Stichwörter
|